Usine d’origine

DIY
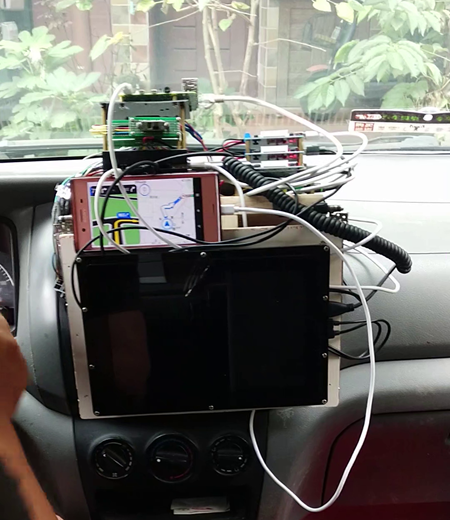
Fonctionnalités implémentées :
- Le module électronique est externe, et la position d’origine de la machine a été convertie en espace de stockage
- L’écran est un écran capacitif de 10,1 pouces. L’écran de Weixue ne prend pas en charge lineageOS.
- Système Windows. En comparant Ubuntu, Rasbian et Android [un système de lignée bien connu par un groupe open source étranger], je pense que Windows 11 ARM64 fonctionne le plus fluide, et actuellement, aucun ordinateur de voiture n’utilise Windows
Modules :
- Écran * 1
- Raspberry Pi 4b * 2 unités : une pour l’installation du système, l’autre pour les routeurs. La version Raspberry Pi 4b 8 Go de RAM est le système d’exploitation, et la version Raspberry Pi 4b 4b 2 Go de RAM est utilisée comme routeur.
- Module amplificateur *1
- Les modules d’alimentation * 3 réduisent la tension de 12V de la voiture à 5V3A, alimentant respectivement la carte mère Raspberry Pi et l’écran
- Les modules d’interrupteur utilisent le fil d’alimentation en panneau clavier
D’autres composants structurels sont tous recyclés à partir de déchets, tels que :
- La coque de l’espace de stockage est fabriquée à partir de planches de bois restantes utilisées par les stagiaires en design industriel à l’école
- La plaque de support du Raspberry Pi 3B est découpée à partir de chutes de feuilles d’acrylique
- La structure de support de l’écran est réalisée en retirant l’écran d’un ordinateur portable mis au rebut
Problèmes et solutions
J’ai comparé Raspbian Arm32, Ubuntu 21.04 Arm64 et Windows 11 Arm64. Windows reste le plus fluide, mais comme Windows n’est pas officiellement publié et a été modifié à partir d’une prévisualisation par un expert étranger, il n’a pas de pilotes WiFi prédéfinis, donc il ne supporte pas les cartes réseau sans fil. Pour résoudre ce problème, j’ai flashé un routeur OpenWRT pour un Raspberry Pi avec 2 Go de RAM, connecté le WiFi au point d’accès du téléphone en mode client, l’ai connecté au port Ethernet et connecté Windows via le port Ethernet.


